Thomas Nagel queried the possibility humans had to “know what it is like for a bat to be a bat” in a 1974 paper that posed pressing epistemological challenges beyond the philosophical community. Nagel was asking us to consider what was the context in which bats move, and to consider the foreign nature of propositions about the distribution of a network of flying bats to humans’ embodied experience: the winged mammals that may have inhabited the eaves of the philosopher’s old summer house in Connecticut or Vermont–I am guessing–where he rises from his desk to spend the early evening watching bats reel out at dusk as they fly in wide arcs, searching en masse to seek out meals of bugs and gnats at dusk. I imagine this only because there is a sense of wonder and of coming against a mental edge that is impossible to get one’s mind around in those wonderful sentences, “I want to know what it is like for a bat to be a bat. Yet if I try to imagine this, I am restricted to the resources of my own mind, and those resources are inadequate to the task. I cannot perform it either by imagining additions to my present experience, or by imagining segments gradually subtracted from it,” They are worthy of Thoreau, as entirely earnest and committed, and at least as beautifully Latinate.
Asking what it is like for a bat to be a bat suggests a new model for collective action, not bumping into one another by using spatial registers in ways we don’t really know how to map–or to even think we can.

Maybe he was in Florida, near Gainsville, or Tampa Bay, where homes for bat colonies have been constructed that offer them temporary housing–

–watching a bat colony search for bugs and flies at a time when the flying mammals are losing safe natural habitat, displaced by construction and environmental saturation of electric lighting. The instant of inter-species realization that launched an epistemic earthquake might have been launched when, returning home, evening drink in hand, Nagel retired to his desk after dinner to write an article arguing we lack not language but adequate mental tools to think like a bat, let alone to “know what it is like for a bat to be a bat,” or imagine a bat-like proposition about space. If the “bat’s point of view” is foreign to our own individually embodied experience so removed from a distributed network to imagine flying through the air or moving the the darkening evening sky–let alone accurately navigating–like a bat, in clouds of a distributed intelligence foreign to the individual human mind, let alone the bat-versions we imagine of pain, fear, hunger, lust, loss or desire. The problem allowed him to ponder the “subjective character of experience,” but may have driven a wedge between human-space and bat-space we are trying to emerge.
Are bats able to synthesize, share, and collectively process a sense of the images of the outlines of trees, skyscrapers, and blocked routes, by abilities to synthesize individual datapoints in something like a collective map map? If it was a philosophical topos of sorts to pose thinking like a man or thinking like a bat, that was inherited from philosophers before Nagel’s essay. Isaiah Berlin, who sought to describe the dignity of human feelings, had little regard for bats, from whom he felt some repulsion– ‘I don’t like flying insects, moths and things, and I hate bats – if I were in a room with bats, I should go completely crazy,” he wrote, describing the bat as a provocation sufficient even to unhinge the most rational of minds. He had traced it back to a fear of moths from his childhood, that his mother indeed took him to a doctor in Baden-Baden to diagnose as a phobia of insects, but found himself unable to relax in the presence of a flying insect or bat. (“‘I shan’t be able to relax until it’s gone,’ but adds, ‘but don’t kill it!’“).
Nagel may have been far less phobic about bats than the towering authority of Wolfson College, but was more interested in the sensory apparatus that contributed to the distinct subjective realty of being a bat, a reality that Berlin seems to have acknowledged readily in the strong reluctance he showed for killing a bat–rather than the unique means of echolocation by which they navigate space from the reflections of the modulated shrieks they send out to detect objects within range, as a form of sonar, as a distinct way that their brains use to navigate space. The inaccessibility of the “inner life of the bat” might be restated as a problem of mapping, however, at least in how we can accommodate–if not understand–how bats navigate space, and indeed understand bat sociability as a problem of mapping, rather than excluding bats’ skills of echolocation from anthropocentric maps. If they have a different sensory apparatus, how can our maps better accommodate bat sociality, as much as bat minds, to the way we map space?
The philosopher performed a powerful thought experiment about human consciousness about the subjectively rooted nature of human experiences, by inviting us to consider what he took as the vast intellectual remove of the experience of those nocturnal navigator. We might, Nagel imagined, well be able to adopt “the bat’s point of view,” rather than a human, if being like a bat did not escape the conceptual tools humans possess. While Nagel may have been looking into the night sky for his historical experiment, the mass knowledge of the “bat” as opposed to the individual actor of history was a stock figure of philosophers, hit upon by the belief philosophers focus on human knowledge and human experience–“what it is like to be a man and not a bat”–might deserve to be reframed. For as human space and bat space intersect and overlap in new ways, we may find the need to try to imagine how their habitats overlap like a Venn diagram. And we do well might to start to do so as a need to try to consider what it would be like to be certain about how bats to move through space in a distributed network of collective thought based on their experience of the world, to extract ourselves form such anthropocentric models of spatial thought.

While Nagel did not necessary mean the swarm thinking that enables bats’ behavior, it is striking that the logic of the swarm of bats’ nocturnal flight paths–that employ vision, but don’t rely on it–may be providing a basis for the new “training sets” that push new horizons for AI intelligence, beyond the “training sets” used to develop computer vision that has helped “train” how computer vision might “see” and recognize facial characteristics. As echolocation helps bats track insects, not crash into each other as they fly in large groups, and navigate caves, moving by sounds, as much as visual cues, the abilities it allows–for densely flying animals to somehow not jam each others’ sounds, but fly side-by-side in large groups without touching, evading one another without audio interference, and distinguishing the recognizable pitch of one another’s individual calls–they may offer a way of being within a distributed network, sustained at over sixty miles per hour–and within underground caves from which up to half a million bats nightly emerge. This would be a form of distributed intelligence and a form of “intelligence,” Nagel’s work reminds us, removed from human ken.
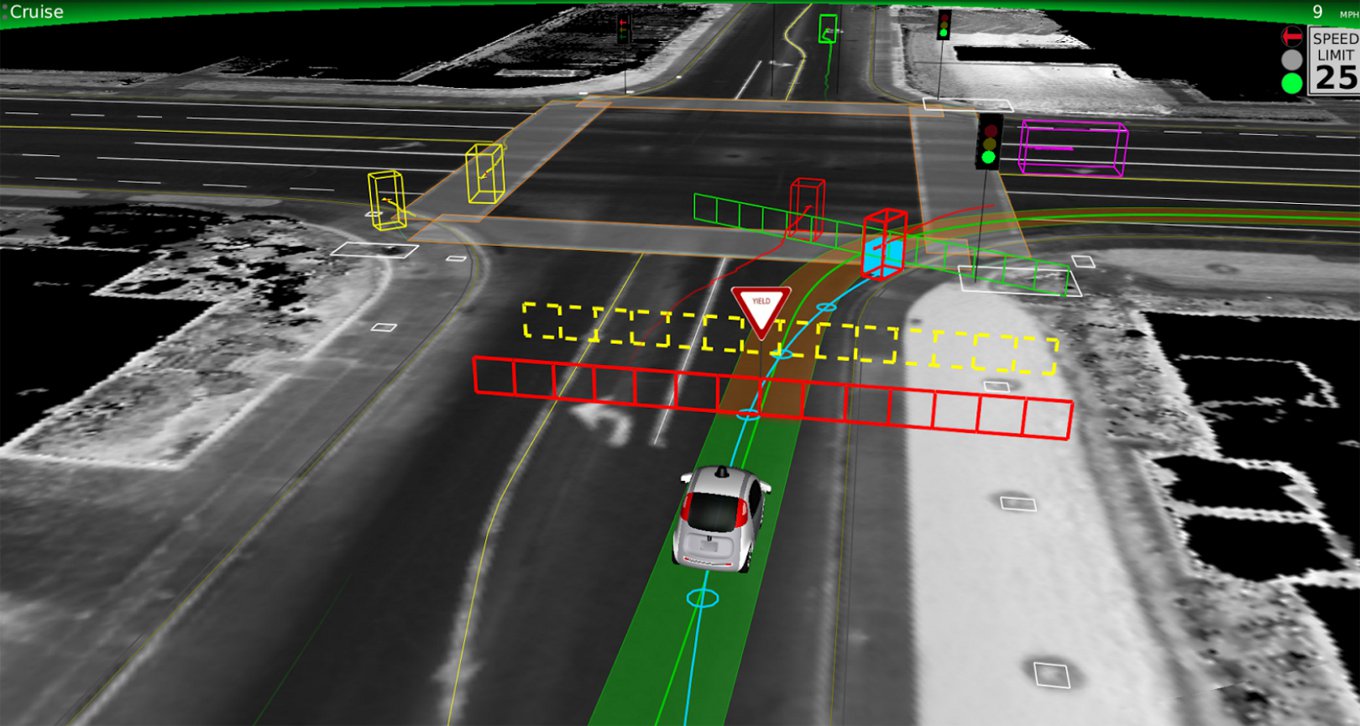
Bats’ powerful bioacoustic abilities to distinguish individual echolocators without interference in crowded caves may offer a powerful model for using sonar signals to create a similar capacities of sonic recognition among the range of sensor data that self-driving cars use by emitting distinctive levels of sonar so specific not only across different makes, but individual drivers, allowing swarms of commuters to calibrate their spatial relations to other commuters by an analogous sort of distributed intelligence: might autonomous vehicles, in other words, be made to think like bats? The thought is tempting, as it would push a new basis for drone “thought” and warm thinking and movement, if it remains a bit of a pipe dream quite different from the current base-maps for self-driving cars, based on mapping roadways, directionality, and the driving cues of highway signs, turn routes, and the sort of tacit signs of how we move cars within lanes, along painted reflective dashes, to prevent or reduce automobile collisions.
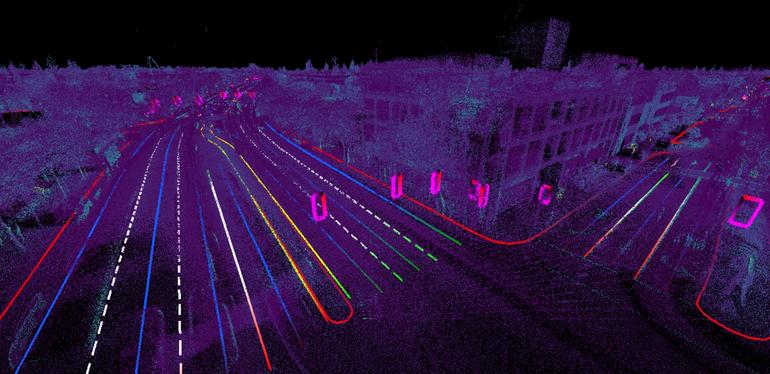
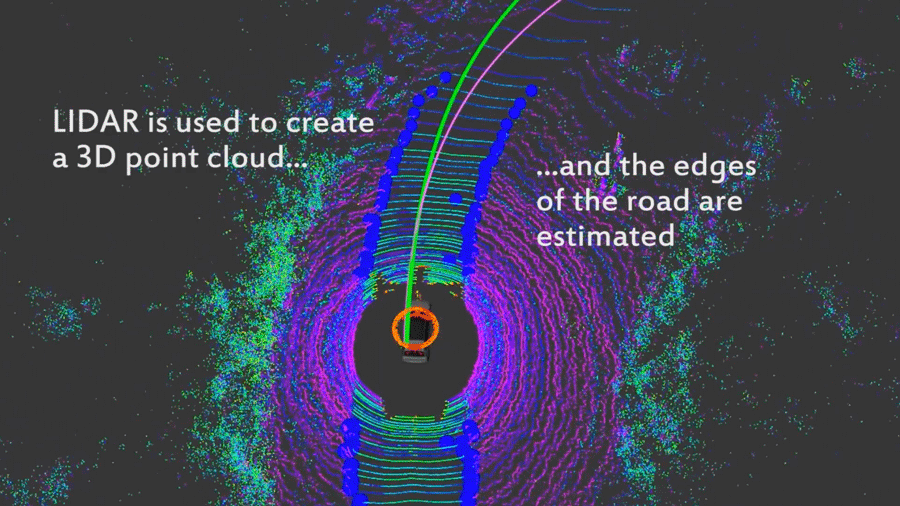
But what are the maps of bats? Could the flight paths of bats ask us to reimagine maps? The level of auditory discrimination is at basis, perhaps, a question not only of “technologies of extremely accurate localization” but bioacoustics. Much as LIDAR might create a point-cloud for areas that are lacking in many topological maps of routes to estimate the areas of roads on which autonomous vehicles might travel, is there a chance that bats move mentally among multiple scales and registers of mapping, moreover, both to navigate among one another’s flight paths while traveling in the night skies at speeds that are often up to 60 mph, and to take paths that allow them to return to the security of caves or other diurnal dwellings?
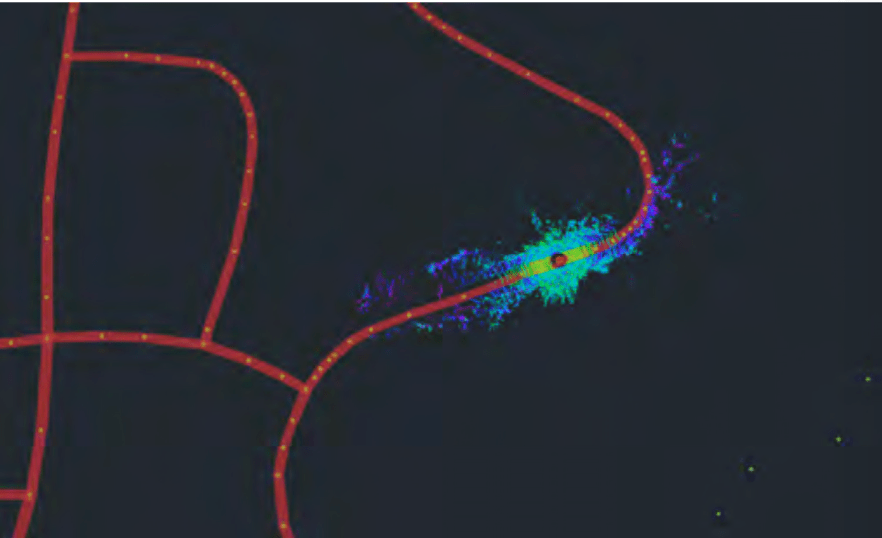
The problem was how the sort of state-of-the-art maps for autonomous vehicles that were dependent on existing maps would make sense in the dramatically changing extra-urban and rural environments on large scales, and how such rapid development of built landscapes could limit the potential positives of autonomous vehicle technologies: often, these areas were the same in which many commuters lived, and where the benefits of driverless cars would be felt, so the benefits of unmooring cars from existing maps was more than a purely academic challenge.
The bioacoustics tools bats use to negotiate in swarms and on individual rest on developed abilities of acoustic recognition that might be especially important to autonomous vehicles–for which the motion between large scale maps and the mapping of fast-moving vehicles beside them remain something of a missing piece, if not a potential cartographical blind spot for modeling distributed spatial intelligence by sonic blasts.
Bats may hone these auditory skills of discrimination of sonic frequencies by skills honed by preparing from departure deep underground in caverns, developing echolocation systems that allow them to capture insects while flying that are less than a centimeter in size, though the presence of a still human can confuse bats’ sonic maps for judging moving prey, while navigating swarms of over 1.5 million–15 million live in Natural Bridges underground caverns, and caves in Carlsbad NM once housed up to eight million.


The ability to map individually and in a swarm make their ultrasonic pulses a powerful tool of acoustic discrimination of routes, but the images bats preserve in their mental maps are not nearly so existential in nature. Indeed, the colony of a million and a half Mexican free-tailed bats that live in downtown Austin, under Congress Bridge, beleived to be the largest urban bat colony in the world, is so prized by the city’s human residents that the emergency of maturing bat pups in the Central Texas night sky is advertised as a cheap thrill during fall sundown of vertiginous biophilia, the dedicated “bat hotline”–(512) 327-9721–provides visitors eager to witness the swarm with confirmation when bats are seen emerging downtown—
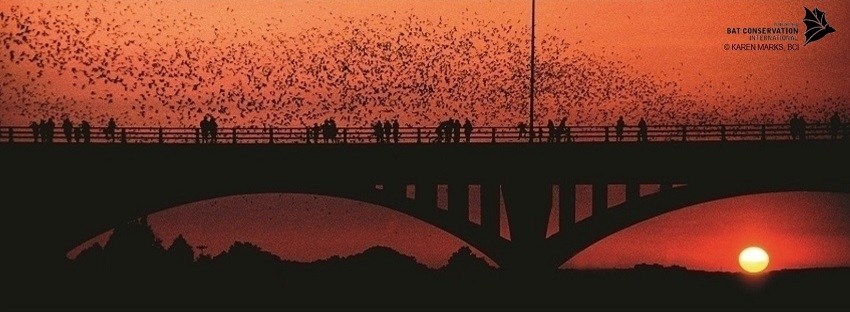
–a biophilic spectacle that highly demonstrates the intricate networks of distributed knowledge as young pups learn to fly, that is a prominent part of the Central Texas city’s ecology. Perhaps a splinter group from the nearby Bracken Cave colony–one of the densest sites of mammals on earth, just a half hour northwest, is the largest known bat colony in the world.
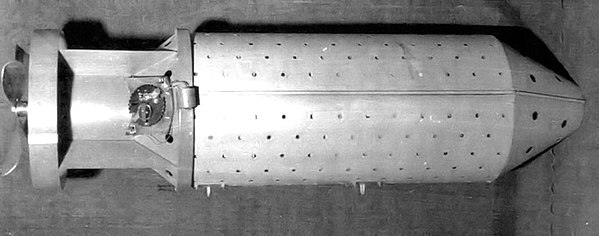
Inspired by the broad arcs of nightly emergence of bats from New Mexico’s Carlsbad Caverns National park as Pearl Harbor was attacked, a dentist first promoted the idea of using bats for fire bombing of Tokyo’s wooden homes. The plans for outfitting thousands of bats with explosives affixed to their little chests–treating the bats as dive bombers to create spontaneous conflagrations in Japanese cities–developed as the letter sent to President Roosevelt led to plans for a nocturnal release of thousands of bats, bearing explosives on their chests, who would roost in the structures of Japanese buildings by treating Mexican free tail bats as a squadron of blind dive bombers who, transported across the Pacific to the eaves of wooden houses in Tokyo, might provoke an incendiary attack by distributing packets of napalm–the basis of incendiary bombs–by the far greater geographic area of bats on whom chests were affixed napalm adhesive vests. Sequestering a thousand free tails hibernating in isolated chambers for trans-Pacific travel never bore fruit; optimistic simulations revealed explosive packets regularly impaired flight and “uncertain behavior of bats” glossed the failure to cooperate in destructive fantasies of using winged mammals to distribute urban conflagrations by 1944, if disastrous experiments in California created some massive explosions. Despite the failure to orchestrate a swarm of bomb-bearing bats, plans to parachute a swarm were brushed aside by OSS director William J. “Wild Bill” Donovan punctured as the “Die Fledermaus Farce,” dismissing the fantasy of costuming bats for an air raid by an Strauss operetta promoted into the operatic repertory to ridicule the strategic value of an airborne zoo –putting the cruelty of immolating flying mammals aside. The basic truth was that the bats’ flight could not be planned.
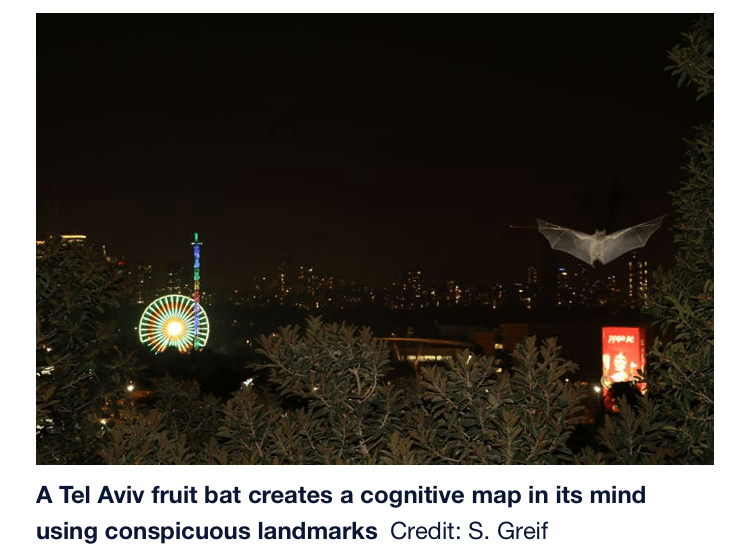
The remove of such a bomb as a way of creating winged kamikazes removed nature of hopes for the strategic deployment of bats in a global strategy from what it is like for a bat to be a bat, or how bats think. But could it be possible to approach the mental outlook that enables bats to navigate nocturnal skies at high speeds in search of fast-moving food? Perhaps Nagel’s project influenced how, since 2011, Israeli researcher Yossi Novel attempt to cross this bridge of consciousness by a colony of bats–nearly 20,000 winged mammals–that he raised from birth to maturity, and tracked their progress as they navigate Tel Aviv’s skyline, using the city lights to navigate their paths home. By fitting the small bats with the “smallest GPS [then] in existence” of about ten grams, scientists charted paths to uncover secrets of the mammals’ neural abilities of nocturnal navigation around man-made waypoints in Tel Aviv’s and the most “visible” nocturnal monuments to detect their cognitive abilities.
While perhaps not as elegant as aerial V-formations of geese, pelicans, or storks, timing their wing beats to catch eddies of air that seem to save birds some 20%-30% in energy, minimizing downdraft to an aerodynamic advantage, and flapping in phase to maximize energy by an anti-phase synchronizing of wingbeats in V-formation: bats’ far smaller wingbeats evolved fewer aerodynamic problems, and responded to fewer challenges of long-distance migration, but offer evidence of assembling spatial maps over time over a surprisingly expansive distance range. Far from a costume party of human orchestration, in a staged ball based on costuming bats, the bats’ flight was nightly tracked.
Indeed, the almost nightly expeditions of bats–some 15 million from caves north of San Antonio TX, in summer months–that show up on radar as explosions of “bioscatter,” as they emerge from caves in search of food, is so striking at large-scale that the small-scale tools of navigation by which the bats move from sundown need to be mapped in relation not only to seasonal meteorology, artificial light, and human disturbances of the environment, although it might be better to begin from more basic–still insufficiently understood–questions of how bats, all too often mischaracterized as “blind,” regularly map space. The National Weather Service mapped nocturnal emergence of bats from caves in Central Texas on its radar that appear to be explosions of meteorological imbalance, but in fact only track the nightly emergence of millions of bats, an efflorescence of cave-dwelling mammals bursting into flight from underground sites–what weather forecasters dismiss them “bioscatter” which raises immediate questions about the bats’ mapping tools, and the distributed networks of navigation that allow bats to fly across the state in search of food, without ever crashing into one another’s paths of flight.
if all maps are ‘surface readings’ and of necessity exclude often crucial sensory “noise,” do those green explosions miss the miracle of bioacoustics that allow sophisticated level of auditory discrimination for bats to move with a sense of where they are going–or what to avoid and what to eat!–while registering or encoding a map to allow them to return to the caves? What are we missing in mapping those bats as mere “biostatic,” of no meteorological significance, we are now asking what sorts of sounds bats are making to one another as swarms disperse from what seem fixed points? Are the bats best mapped as swarms, or do they have individual flight paths, and, if so, what is their form of air traffic control?
Without explicitly trying to revisit Nagel’s thesis, the data gained about the bat’s spatial sense of navigation and its brain capacities provided a sense of navigation as they flew above Tel Aviv’s skyscrapers in relation to the tallest towers of the built manmade environment by a GPS of their own devise, that revealed how bats possessed uncanny navigational skills to fly in straight lines at considerable elevations of over a hundred meters, using as points of reference trees up to twenty-five meters away. Outfitted with GPS chips, they mapped the progress made from bat pups’ first exploratory flights, theorizing their abilities to encode learned flight paths to identify the best routes to locate food sources in the city at distances far beyond what sonar allowed them to navigate, to accumulate a mental map of the city that they accrue over years around visual landmarks, taking shortcuts to move across dozens of kilometers.
Israeli researchers explained without much surprise how their bats navigated elevated points on the skyline of Tel Aviv as akin to the same GPS tools that they used to navigate their commutes around the skyscrapers that provided waypoints that were, somewhat quaintly, the very same waypoints of the researcher’s own daily commute: it seemed eerily natural that bats had substituted for other landmarks that bats employ to orient themselves to a skyscape to seek their food or find their diurnal dwellings, as a basis for aerial navigation that provide orientation to the built environment. It might make sense to ask who was enabled by technology, or how technologies allowed us to think like bats: scientists interpreted their data by consulting with pilots, in order to determine what sorts of landmarks the bats released near Bersheba to guide their fairly secure paths, or what types of spatial learning bats developed over time, and how they build maps that allow them to navigate areas as expansive as 100 sq km.
The studies of bats’ neural navigation nets began in 2011 in Israel, in a sense as a casualty of war: the military engagements in Israel created huge pressures on displaced and endangered animals, peace also provided new nesting opportunities for bats, as Haaretz reported Eran Levin of Tel Aviv University’s Department of Zoology discovered species-rich bat populations nesting in long-vacated army bunkers in the Jordan Valley, abandoned since the 1994, but now repurposed by displaced bats as perfect niches that mimic caves, repurposing the bunkers abandoned by Israel Defense Forces, vacant since peace accords with Jordan, but serving as a new habitat for large colonies of Egyptian fruit bats. The fruit bat populations provide a new sample group for zoological studies, providing a unique site to study bat populations, as help from Bat Conservation International and the Ford Foundation transformed the bunkers to homes for displaced bat colonies, including plastic nets and ropes to refashion their ceilings for bats that could restart new colonies holding up to twelve different species in twenty old unused bunkers, that have welcomed bats from the Palestinian Territories, Jordan, and Israel to temporary or perhaps permanent shelters.

If bat studies progressed in the West Bank, the space of urban bats have been studied to show their ability yto navigate from the desert locations as Bersheva to urban habitats. taking them to new areas in the desert over forty kilometers from their usual habitat, finding fruit trees where they feed in the desert, 44 kilometers south of their normal range, and releasing them at dusk who had no problems finding their ways back to their favorite fruit trees, and those who were released at dawn went back to their caves. The bats seemed to use landmarks to guide their paths of flight to do so, and the bats that were released in a crater, over eighty km south of their caves, gaining the purchase to start to fly north: as they took time to exit the crater and to get oriented and needed to leave the crater to place themselves against distant landmarks to return home–waypoints, as it were, to mark their own travels that we imagined computationally checked out, grasping their internal wayfinding abilities by analogy to our own use of GPS in multiple contexts; in what risks a circular argument, bats were argued to have internalized a GPS system. Did the GPS trackers enable researchers to map a bat navigating system, or to think that they had?

The surprising lack of difficulty that the bats had in moving collectively is striking. The success with which bats learned short cuts, and indeed re-oriented themselves to space against spatially removed landmarks, seemed to suggest that they had been caught in the act of building a sophisticated mental map on which they could draw, even if it did not derive in sight, as they could indeed “see” it in their minds, that raised questions of how to describe the mental processes by which they were able to navigate after having been moved almost fifty kilometers south of their usual feeding grounds, and easily able to find their familiar sites of rest by the following day: the description of the bats as moving against buildings by their “own GPS” applied the grids we use to navigate traffic, airspace, or bike rides to the cognitive tricks of the mental operations of bats, without missing a beat. Tel Aviv researchers started monitoring a colony of 20,000 bats from birth could unlock secrets of sociability allowing colonies of thousands of bats to survive over forty years, and indeed to all use their own abilities of sonar to fly together collectively within subjective tools, by a neural map that the abilities of echolocation bats use for closer range encounters.
Such studies that hint at the importance of bat sociability suggest intriguing orientational abilities of mouse-eared bats to orient themselves by magnetic fields–as if by analogy to a compass–at sunset, when they emerge, the suggest possession of considerable orientational tools. but the study of how bats can cannily navigate Tel Aviv skylines suggested an uncanny ability to internalize built landscapes, and to study their behavior that would not cause duress to any single bat. The image of the peaceful nocturnal navigation of the Holy Land seems a collective experiment for which funding must exist in Israel, the questions of echo-recognition were hoped to find a solution to how bats map human-built space, and perhaps the surprise came when they were recently explained to built a map akin to GPS as the means that “experienced bats” move with such surety across what seems a known space, taking short-cuts around buildings to find new paths to food, in ways that indicate they have built a map of the city in their bat-minds–or to cast the bats minds not as a different embodied experience, but akin to GPS machines.
The mapping tools strapped on their backs seem to have provided terms to allow us to imagine how bats navigate as a swarm–by a version of GPS?–as if the point-based mapping system that we adopt to move through space provides a basis for understanding how to be like a bat, or how a bat navigates space–the GPS monitors seem to adopt a sort of invisible agency in the experiment, indeed, that allow us to think we can indeed, pace Nagel, enter a bat’s mind. But the astounding adoption and growth of GPS as a universal translation device seems to have been extended across species in the experiment that ties GPS monitors as tools without their own spatial logic.
Whether such monitors afford a sense of what it is like for a bat to be like a bat may be less evident than the possible expansions of imagining a neural net or distributed network by which automated cars case use GPS. There is a sort of romancing of the GPS devices as an agent, in other words, that links the bats to one another, and allow serve as universal translating machines,–a version of the instantaneous translation of TARDIS, in Dr. Who, that relies on matters of telepathic fields, or the “babel fish” that excretes translations into the auditory canal in which it is implanted like an active hearing aid in an auditory channel, as a sort of prosthetic that provides instant empathy in Hitchhiker’s Guide, or the prosthetic Microsofts that plugged into “wetware” sockets behind the ear like a chips to offer exoskeletal enhancements enabling fluency in other languages: the conceit of simultaneous translation the was tweaked by Douglas Adams and William Gibson was imagined as needed to resolve an atomic stalemate that emerged during space travel, in Murray Leinster’s First Contact, as atomic detente after the encounter of a ship of humanoid bipeds are caught in a deadlock near the Crab Nebula–and leads to a memorable conclusion as humans learn to recognize the truly universal sounds of laughter after both ships find they have proposed the same solution.
The fiction of simultaneous translation in the 1945 story would be the basis for resolving the actual fears of atomic war at the foundation of the United Nations, which from its start promised to instantaneously translate all communications under its auspices into each of six “official” languages–Arabic; Chinese; English; French; Russian; Spanish–from the 1945 San Francisco Conference that led to its formal founding; instantaneous interpretation for speeches anywhere from as long as thirty-five minutes to a full hour became a basis for world peace, if one that Preter Pyotr Avaliani compared to “driving a car that has a steering wheel but no breaks and no reverse”–as it allows no time for corrections–characterized as premised on remembering enough short-term but forgetting the words one just said.

The analogy takes us back to unidirectional routes of travel, waypoints, and the creation of a mental map without what we recognize as vision, based on the supersensitive visual perceptions of far greater distances than we’ve imagined, if a vision not dependent on color sensitivity or differentiation.
The GPS device attached to the backs of the bats provided the very tools used to track their motion would allow us to think like a bat, at least in offering a basis to interpret the how the bats navigated airspace,–and make us realize that just as we enhance our navigational abilities by placing trust in Waze and “live” GPS navigation to avoid traffic jams and plot our daily commutes–or used to–they, too, allow us to think like bats.
But the elevation of way finding tools in GPS might make us imagine we’ve found way to think like bats, as opposed to equip them with translation devices that provide a better analogy to think about how they travel.
Echolocation and geolocation are different spatial logics. But we may be in danger of assimilating bats to a system of something like a GPS-inflected AI. If the earlier model of navigation by magnetic fields at sunset posed the problem of the internal compass by which bats move after sunset by magnetic fields, the mental dominance of GPS as a grid we have internalized around waypoints, destinations, and points of primary reference provides a new model to think about how bats do think.